
 Wśród osób latających dronami wyścigowymi krąży wiele pojęć, które na początku swojej drogi możesz często uznać za niezrozumiałe i trudne do zapamiętania. Niektóre z nich są bardzo rozległe i potrzeba sporo czasu, aby poznać wszystkie szczegóły z nimi związane.
Wśród osób latających dronami wyścigowymi krąży wiele pojęć, które na początku swojej drogi możesz często uznać za niezrozumiałe i trudne do zapamiętania. Niektóre z nich są bardzo rozległe i potrzeba sporo czasu, aby poznać wszystkie szczegóły z nimi związane.
Ja jednak postanowiłem przygotować artykuł skondensowany, który bardzo krótko i treściwie wyjaśni najważniejsze skróty, którymi posługujemy się w tym środowisku, abyś nie tracąc wiele czasu poznał najważniejsze z nich.
FC (Flight Controller)
(Kontroler lotu), czyli serce naszego drona, które odpowiedzialne jest za wszystkie obliczenia i operacje jakie maszyna wykonuje w trakcie lotu. To do FC podłączamy wszelkie inne urządzenia takie jak ESC, kamerę, GPS, VTX itp.
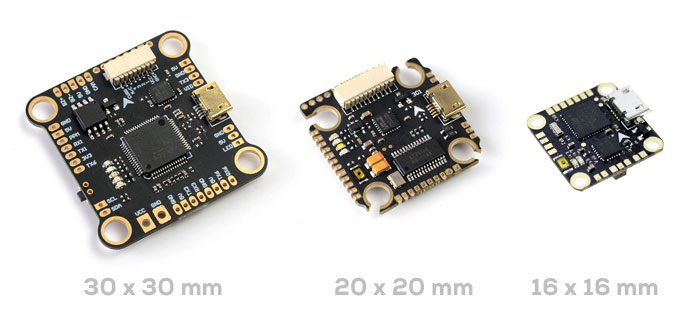
FC występuje w różnych rozmiarach i może mieć różne opcje, czy też właściwości np. wbudowany odbiornik, wbudowany barometr, a nawet całe ESC. Może też posiadać różne jednostki obliczeniowe (procesory) oznaczone np. F3, F4, F7. Najbardziej popularne rozmiary FC to 30 x 30 mm (używane zazwyczaj w dronach 5 calowych), 20 x 20 mm stosowane przy mniejszych 2, 3 lub 4 calowych quadach, a nawet 16 mm x 16 mm, które stają się coraz bardziej popularne w tzw. whoopach.
F3, F4, F7
Symbol procesora użytego w FC. Im wyższa cyfra, tym nowsza, szybsza jednostka pozwalająca na większą ilość obliczeń. Kontrolery lotu z procesorem F3 są już coraz rzadziej spotykane, a wraz z pojawieniem się BetaFlight 4.0 ogłoszono, że nie będą one już dalej wspierane, ze względu właśnie na małą moc obliczeniową.
Kontrolery z procesorem F4 to dzisiaj standard, choć na rynku pojawiło się już sporo FC z szybkimi procesorami F7, które oferują większą moc obliczeniową, większą ilość portów UART oraz brak niektórych problemów z podłączeniem odbiorników FrSky.

ESC (Electronic Speed Controller)
Elektroniczny kontroler obrotów silnika. To on po otrzymaniu sygnału od FC “mówi” silnikom jak szybko powinny się obracać. Jest to podstawowa jednostka w każdym dronie (nie tylko wyścigowym).
ESC występuje w formie jednej płytki tzw. “ESC 4 in 1” do której, lutujemy każdy z czterech silników lub w formie pojedynczego kontrolera (dla każdego silnika z osobna), który umieszczamy na ramionach naszej ramy.
Drugą najważniejszą cechą poza budową ESC jest ich “rating”, czyli dopuszczalne natężenie prądu jakie wytrzymuje zanim się spali. Mamy więc ESC 20A, 30A, 50A, a ostatnio nawet i 100A.
ESC ze względu na datę produkcji lub samą budowę może posiadać też różne oprogramowanie: BLHeli-S lub BLHeli-32 (szybszy, 32-bitowy mikro kontroler) i obsługiwać różne protokoły komunikacji z FC np. D-Shot 300, D-Shot 600, D-Shot 1200 itd. Obecnie standardem są ESC o dopuszczalnym prądzie 30A z BlHeli_S i D-Shot 600.
ESC tak jak i Flight Controller montuje się ze sobą na tzw. stacku, dlatego ESC też występują w różnych rozmiarach 30×30, 20×20 czy 16×16 mm.

FCC
FCC jest to oznaczenie typu oprogramowania dla aparatury i odbiorników FrSky. FCC to oprogramowanie zgodne z regulacjami amerykańskiej federalnej komisji komunikacji (Federal Communications Commission). Oprócz wersji FCC (Non-EU) występuje też wersja przeznaczona na rynek Europejski oznaczona jako EU lub EU-LBT.
Po zakupieniu aparatury FrSky możemy do niej podłączyć (powiązać z nią) wiele odbiorników takich jak XM+ czy R-XSR. Proces powiązania aparatury z odbiornikiem nazywamy “bindowaniem”. Należy jednak pamiętać, że aby zbindować ze sobą aparaturę i odbiornik muszą one posiadać ten sam firmware. Nie należy się jednak tym przejmować na etapie zakupu, ponieważ oprogramowanie to można później dowolnie zmieniać i w aparaturze i w odbiorniku, aby te były ze sobą zawsze kompatybilne.
FOV
Z angielskiego “Field of view”, czyli pole widzenia. Termin stosowany najczęściej przy kamerach FPV określający kąt, czy też szerokość fizycznego obrazu jaki kamera jest w stanie zarejestrować lub w przypadku gogli FPV, kąt, czy też szerokość widzianego przez nas wyświetlacza. W przypadku kamer większy kąt pozwala nam zobaczyć więcej elementów otoczenia (na tym samym ekranie) na wysokość i szerokość, a w przypadku gogli większe FOV oferuje po prostu fizycznie większe ekrany, które widzimy.
Świetne narzędzie do porównania FOV w różnych goglach znajdziesz na stronie Oscara Liang’a

IPD
Interpupillary distance to dystans mierzony pomiędzy dwoma gałkami ocznymi. Określany w mm pokazuje jak szeroko rozstawione są nasze oczy. Termin ten jest szczególnie istotny, jeżeli chodzi o gogle FPV, bo właśnie w nich dzięki systemowi regulacji ekranów (regulacji IPD) możemy dostosować je w taki sposób, aby obraz był dla nas zawsze ostry. Jeżeli regulacja IPD w goglach jest mniejsza niż nasze IPD występuje zazwyczaj efekt rozmytych krawędzi oraz nieostrego obrazu. Producenci podają skalę w jakiej możemy ten parametr w danych goglach regulować np. 58-72 mm (Aomway Commander V2) lub 59-69 mm (Fatshark HDO)

XM+
Najmniejszy, najtańszy i najbardziej popularny odbiornik FrSky współpracujący ze wszystkimi nowymi aparaturami tej firmy. Odbiornik XM+ jest szeroko stosowany we wszystkich mniejszych i większych dronach wyścigowych i uznawany jest jako standard wśród tej społeczności. XM+ posiada diversity, czyli dwie anteny pozwalające na dużo lepszy odbiór sygnału, ale nie obsługuje telemetrii, czyli nie pozwala na przesył bardziej zaawansowanych informacji w drugą stronę, czyli do naszej aparatury np. napięcie baterii czy siły sygnału. Informacje te są jednak dostępne w naszych goglach po odpowiednim skonfigurowaniu OSD.

FPV, LOS
First Person View, czyli widok z pierwszej osoby. Wśród dronów wyścigowych FPV oznacza najczęściej latanie w goglach FPV. LOS oznacza Line of sight, czyli lot w zasięgu wzroku, w którym obserwujemy naszą maszynę z ziemi (latamy bez podglądu obrazu).
VTX
Video transmitter, czyli nadajnik wideo to kolejny podstawowy element każdego drona z systemem FPV, na który składa się właśnie kamera i nadajnik wideo. To właśnie on po otrzymaniu obrazu z kamery wysyła ten analogowy sygnał do naszych gogli.
VTX’y występują w różnych rozmiarach, z różną ilością obsługiwanych kanałów (pasm), z różną mocą nadawania oraz różnymi opcjami dodatkowymi. VTX może posiadać regulator napięcia, mikrofon, możliwość zdalnej zmiany mocy nadawania (Smart Audio) czy slot na kartę microSD, gdzie zapisze obraz analogowy bez zakłóceń z całego twojego lotu.
Siłę czy też moc nadawania VTX’a określa się w mW (miliwatach)

BNF, RTF, PNP, PNF
Skróty te pojawiają się przy zakupie gotowych do lotu dronów i oznaczają zawartość zestawu jaki kupujemy.
- BNF (Bind and Fly) Zestaw zawiera gotowego, złożonego drona wraz z odbiornikiem (najczęściej FrSky). Do lotu potrzebujemy jeszcze aparatury, baterii, łądowarki gogli itp.
- RTF (Ready to Fly) Kompletny zestaw gotowy do lotu. Najczęściej znajdziemy tam drona, aparaturę, czasami też baterię i ładowarkę a nawet i gogle FPV.
- PNP lub PNF (Plug and Play lub Plug and Fly) Ten zestaw zawiera drona, ale nie zawiera aparatury. Sprzedawcy różnie nazywają swoje zestawy, więc należy zwrócić uwagę co dokładnie oferują pod tą nazwą. W teorii jest to praktycznie to samo co BNF.

VSEN
Voltage Sensor, czyli woltomierz. Pin, który występuje w różnych kamerach FPV i pozwala monitorować napięcie baterii w dronie oraz wyświetlać je na ekranie gogli. Ten sposób jest jednak rzadziej używany, ponieważ dziś wszystkie kontrolery lotu (FC) mają wbudowany chip OSD.

KV
Skrót odnosi się do stałej prędkości silnika bezszczotkowego i jest on mierzony liczbą obrotów na minutę, które silnik wykonuje, gdy zostanie zasilony napięciem 1V (bez żadnego obciążenia).
Na przykładzie: napięcie naszych naładowanych baterii w przypadku pakietu 4S to 16,8V. Jeżeli z takim napięciem zasilimy silnik 2500KV, to będzie on obracał się maksymalnie 42 000 razy na minutę (16,8 x 2500). Z reguły silniki powyżej 2000KV zasilmy bateriami 4S, a drony zbudowane pod 5 czy 6S wykorzystują silniki poniżej 2000KV.
KV oraz dopuszczalne napięcie baterii zawsze jest podane na stronie produktu.

OSD
OSD oznacza “On Screen Display”. OSD to bardzo przydatne, dodatkowe informacje nałożone na obraz z kamery FPV i wyświetlane bezpośrednio w twoich goglach.
OSD możemy sami konfigurować w Betaflight. Mamy możliwość wyboru jakie informacje, gdzie będą wyświetlane, a także jak będą wyglądały. Dzięki OSD możemy wyświetlać np. czas lotu, siłę sygnału, napięcie baterii, moc i kanał nadajnika wideo oraz wiele, wiele innych informacji.
Kiedyś nie wszystkie kontrolery lotu miały wbudowany chip OSD, więc aby te informacje wyświetlać należało przylutować dodatkową płytkę jak np. minimOSD. Dziś właściwie każdy kontroler ten chip posiada więc, aby uzyskać OSD na ekranie wystarczy odpowiednio podłączyć kamerę oraz vtx z wykorzystaniem kontrolera lotu.

TVL
Termin TV Lines to termin stosowany w kamerach przemysłowych określający w inny sposób rozdzielczość kamery. Oznacza ilość poziomych linii, które kamera może wyświetlić. Im większa wartość tym obraz jest bardzij szczegółowy. Do pomiaru tej właściwości używa się specjalnych plansz czy też wykresów, ponieważ ludzkie oko nie jest w stanie zobaczyć tych linii na ekranie. Obecnie najlepsze kamery FPV takie jak Runcam Phoenix czy Foxeer Predator potrafią zarejestrować nawet 1200 TVL.

PAL, NTSC
Oba pojęcia oznaczają system kodowania kolorów w sygnale analogowym. Nie zagłębiając się w szczegóły system PAL (stosowany głównie w Europie) ma możliwość dostarczenia sygnału o wyższej rozdzielczości, a system NTSC (system międzynarodowy) o większej ilości klatek na sekundę. W FPV poleca się stosowanie systemu PAL, ponieważ posiada on aż o 20% większą rozdzielczość niż NTSC (576 vs 486 widocznych linii), ale obsługuje 25 klatek na sekundę, a NTSC aż 30. Współczesne kamery FPV mogą przełączać się dowolnie pomiędzy tymi standardami, wystarczy odpowiednią opcje wybrać w menu kamery.
PDB
Power distribution board, czyli płytka dystrybucji prądu lub zasilania. PDB jest to płytka z elektroniką zawierająca regulatory napięcia (BEC) obniżające napięcie wejściowe z naszej baterii np. 16.8 V do niższego, potrzebnego np. żeby zasilić odbiornik naszej aparatury czy VTX (z 5V, 9V czy 12V). Jeszcze rok temu była to niezbędna elektronika do budowy naszego koptera. Dziś regulatory napięcia możemy spotkać w ESC (4 in 1) lub nawet samym FC. Płytka PDB zazwyczaj jest bardzo tania i wciąż może okazać się przydatna, aby w łatwy sposób uzyskać pożądane napięcie bez względu na to jakiej baterii użyjemy.

BEC
Battery Elimination Circut (patrz PDB).
VCC, VBAT
Symbol VCC lub VBAT oznacza, że w takim miejscu powinno znaleźć się napięcie baterii i albo należy je tu podłączyć albo (jeżeli bateria jest już podłączona) je tu znajdziemy. Na FC zazwyczaj małe pady do lutowania oznaczone VBAT mogą służyć do zasilenia urządzeń potrzebujących większego napięcia jak np. VTX (7-26V).

1S, 2S, 3S, 4S, 6S …
To oznaczenia występujące na bateriach lipo i oznaczające ilość tzw. cel (ogniw), z których składa się cała bateria. Bateria 1S składa się z jednego ogniwa, a bateria 4S z czterech, dlatego baterie nazywamy też pakietami (ogniwa się łączy w pakiety).
Każde takie takie ogniwo ma swoje napięcie znamionowe wynoszące 3,7V. Napięcie całego pakietu jest sumowane wraz z ilością wykorzystanych ogniw. Pakiet 3S będzie miał zatem napięcie 11,1V, a pakiet 4S – 14,8V.
Temat baterii litowo-polimerowych wykorzystywanych w dronach wyścigowych jest bardzo rozległy i nie zmieści się w tym artykule. Interesując się jednak składaniem dronów, powinieneś zainwestować więcej czasu na jego zbadanie, aby nie doprowadzić do sytuacji niebezpiecznych. Źle użytkowane pakiety, przeładowane, uszkodzone itp. mogą stanowić zagrożenie.

HV, LiHV
Skrót od High Voltage. W przypadku baterii lipo oznacza się tak pakiety, których napięcie maksymalne jest wyższe niż standardowych pakietów. LiHV (Lipo High Voltage) ładujemy wtedy maksymalnie do 4,35V na celę, a nie 4,2V jak w przypadku zwykłych baterii. LIHV wykorzystuje się często w whoopach, czyli niewielkich, lekkich dronach, które zazwyczaj cierpią z powodu zbyt ciężkiego pakietu, więc aby wydłużyć czas lotu na mniejszym, lżejszym pakiecie wykorzystuje się LIHV.
Tryby łączenia aparatury (np. QX7) z odbiornikiem (np. XM+). Podczas procesu bindowania zawsze zostaniesz zapytany w jakim trybie chciałbyś się połączyć.
- D8 – Starszy tryb obsługujący 8 kanałów i telemetrię, z którego powoli się rezygnuje na rzecz D16.
- D16 – Nowszy tryb połączenia wspierający 16 kanałów i telemetrię.
- LR12 – 12 kanałowy tryb dalekiego zasięgu (Long Range) umożliwiający połączenie tylko z określonymi, często dużo większymi odbiornikami . Wykorzystywany częściej w samolotach lub tzw. latających skrzydłach.

UART
Universal Asynchronous Receiver and Transmitter. Układ scalony na kontrolerze, który dzięki portowi szeregowemu zapewnia komunikację FC z innymi urządzeniami bądź akcesoriami. Na FC jeden UART tworzą dwa pady oznaczone jako RX (Receive) i TX (Transmit). Zazwyczaj znajdziemy ich jednak kilka, dlatego oznaczone są one ponumerowane tj. RX1 i TX1, RX3 i TX3 itd. Czasem ze względu na brak miejsca opisuje się je jeszcze jako np. T3 i R3.
Chcąc podłączyć dodatkowe urządzenie do FC, które wymaga z nim komunikacji, konieczne jest oprócz zapienienia mu zasilania, podłączenie go do jednego z padów RX lub TX, a czasem do obu na raz jeżeli komunikacja ma się odbywać w dwie strony

Na FC port RX odpowiada za odbieranie danych, a TX za ich wysyłanie dlatego, jeżeli chcemy wysłać jakąś informacje np. podłączając Smart Audio w odbiorniku wideo, to dodatkowy przewód musimy podłączyć do do pada TX.
Do UARTU na FC podłączamy właściwie wszystkie komponenty naszego drona. Odbiornik, (np. XM+) który potrzebuje komunikacji z aparaturą i FC, kamerę jeżeli chcemy kontrolować właściwości jej obrazu za pomocą radia, czy choćby GPS, który pozwala na odbieranie i wysyłanie informacji o położeniu naszego koptera.
WDR
Wide Dynamic Range to funkcja w oprogramowaniu kamery wykorzystując specjalne algorytmy analizujące obraz potrafiące rozpoznać, które jego obszary należy rozjaśnić, a które nie.
Pozwala to na uzyskanie większej ilości szczegółów i znacznie bardziej czytelnego obrazu w najbardziej zacienionych miejscach.
Niektóre kamery FPV poza możliwością włączania i wyłączania WDR mają możliwość ustawienia jego siły czy też skali. Większość też tą opcje ma standardowo włączoną.

RSSI
RSSI (Received Signal Strength Indication) jest to jak sama nazwa mówi jest to wskaźnik siły sygnału. RSSI odnosi się często do zasięgu naszego drona. Kiedy komunikacja miedzy aparaturą, a odbiornikiem jest słaba – RSSI spada i zazwyczaj kończy się to twardym lądowaniem.
Popularny odbiornik XM+ (nie obsługujący telemetrii) pozwala na wyświetlanie siły sygnału na ekranie naszych gogli (0-99). Jest to zatem wartość na OSD, na którą szczególnie powinniśmy uważać. R-XSR natomiast dzięki telemetrii pozwala na wysłanie tej informacji z powrotem do aparatury, która specjalnym komunikatem dźwiękowym poinformuje nas o niskim zasięgu i często zapobiegnie utracie połączenia.
RSSI nie musi odnosić się tylko do komunikacji aparatura-odbiornik. Rapidfire np. na ekranie gogli potrafi wyświetlać paski sygnalizujące siłę sygnału między nadajnikiem, a odbiornikiem wideo.

Smart audio, Tramp
Termin bardzo mylący dla początkujących, ponieważ nie ma on nic wspólnego z dźwiękiem (audio). Smart Audio to funkcja w BetaFlight, która pozwala kontrolować nadajnik wideo w naszym dronie za pomocą OSD. Obsługę Smart Audio posiada dziś zdecydowana większość VTX’ów na rynku (jak np. ten polecany przeze mnie), ale wciąż zdarzają się jeszcze takie, które tej funkcji nie mają, więc zwróć na to uwagę wybierając swój nadajnik.
Poza standardowymi przewodami (plus, minus, wideo) do portu TX na FC wystarczy podłączyć jeden dodatkowy przewód, a w zakładce ports w Betaflight skonfigurować ten port do obsługi Smart Audio i już powinniśmy móc zmienić kanał oraz moc VTX’a za pomocą OSD.
Innym, mniej popularnym protokołem komunikacji VTX z FC jest Tramp. Zaimplementowany jest on w nadajnikach ImmersionRC. Dla zwykłego użytkownika nie rożni się on właściwie niczym od Smart Audio. W Betaflight, a później OSD, wybieramy protokół Tramp zamiast Smart Audio i to właściwie wszystko.

Angle, Horizon, Acro
Angle, Horizon oraz Acro to jedne z najbardziej popularnych trybów lotu naszego drona. Możemy je zdefiniować w Betaflight i przełączać się miedzy za pomocą przełącznika w aparaturze nawet podczas lotu.
- Angle – Tryb uznawany za najłatwiejszy do opanowania. W trybie Angle następuje ciągłe samopoziomowanie drona za pomocą wbudowanego w FC akcelerometru, a maksymalne wychylenie drążków w aparaturze pozwala na pochylenie się drona jedynie do pewnego kąta.
- Horizon – Tryb dla średnio zaawansowanych pilotów. Samopoziomowanie w tym trybie również występuje ale kąt pochylenia drona nie jest już ograniczony, co pozwala na wykonywanie tzw. flipów.
- Acro – Tryb akrobatyczny bez żadnej stabilizacji. Najtrudniejszy do opanowania, ale jeżeli chcesz nauczyć się dobrze latać powinieneś zacząć właśnie od niego i nie nabierać złych nawyków z trybów przeznaczonych dla początkujących.
Air mode
Tryb w którym silniki pomimo odpuszczenia przepustnicy (zmniejszenia “gazu” do 0) wciąż się kręcą z minimalnymi obrotami, aby zapobiec efektowi bezwładnego opadania drona. W trybie Air mode po odpuszczeniu przepustnicy (throttle) quad będzie znacznie stabilniej opadał nie przechylając się przy tym w żadną stronę. Tryb ten może zostać włączony bez względu na to jakiego trybu lotu (Angle, Horizon, Acro) używasz.
XT30, XT60, XT90
Złącza prądowe używane w bateriach zasilających naszego drona.
- XT30 – Najmniejsze z całej “rodziny” złącze, które skutecznie zastąpiło w mikrusach inne, małe złącza jak choćby popularne kiedyś “czerwone” JST.
- XT60 – Standardowe złącze stosowane we wszystkich dronach 5, 6 czy 7 calowych. Dopuszczalny prąd ciągły jak sama nazwa wskazuje to 60A. XT60 nie jest specyficzne dla dronów i wykorzystuje się je także choćby w drukarkach 3D.
- XT90 – Największe i najmocniejsze złącze. Nie jest właściwie używane w naszym hobby, ale warto wiedzieć, że istnieje.
